Visualizing the Stiffness Tensor
Implementation of the theory from Böhlke, Brüggemann (2001) to visualize the stiffness tensor
Intro
Reflecting on my time in Karlsruhe, I recalled looking 3D plots of the stiffness tensor. This inspired me to explore how these plots are generated by creating a visualization tool myself.
The key theoretical background can be found in Böhlke and Brüggemann (2001) 1.
Theory
The stiffness tensor plays a key role in elastic constitutive laws, such as Hooke’s law. In continuum mechanics, it maps the stress tensor $\sigma_{ij} \in \mathbb{R}^{3,3}$ to the strain tensor $\epsilon_{kl} \in \mathbb{R}^{3,3}$. In other words, $\mathbf{C}:\mathbb{R}^{3,3} \rightarrow \mathbb{R}^{3,3}$: \(\epsilon_{kl}=C_{klij}\sigma_{ij}\)
Since it’s a 4th order tensor in 3D, the stiffness tensor originally has 81 components. However, due to symmetries, the number of independent components is reduced to 21:
- The strain tensor is symmetric because it excludes rigid body motion $C_{klij}=C_{lkij}$
- The stress tensor is symmetric due to conservation of angular momentum $C_{klij}=C_{klji}$
- The stiffness tensor itself is symmetric because of how hyperelastic energy is formulated $C_{klij}=C_{ijkl}$
After accounting for these symmetries, only the material-specific symmetries remain.
The inverse relationship, mapping strain to stress, uses the compliance tensor $\mathbb{S}=\mathbb{C}^{-1}$. This form will be important in the formulation below.
Böhlke, Brüggemann (2001) 1 present direction-dependent expressions for several scalar moduli, including Young’s modulus $E(\mathbf{d})$, bulk modulus $K(\mathbf{d})$, shear modulus $G(\mathbf{d},\mathbf{n})$, and the Poisson ratio $\nu(\mathbf{d},\mathbf{n})$:
Young’s Modulus
\(\frac{1}{E(\mathbf{d})} = \mathbf{d} \; \otimes \mathbf{d} \; \cdot \mathbb{S}[\mathbf{d} \; \otimes \mathbf{d}]\)
Bulk Modulus
\(\frac{1}{3K(\mathbf{d})} = \mathbf{I} \; \cdot \mathbb{S}[\mathbf{d} \; \otimes \mathbf{d}]\)
The remaining material parameters depend on more than one direction. Therefore, visualizing them requires a fixing one of the two arguments directions to a constant value.
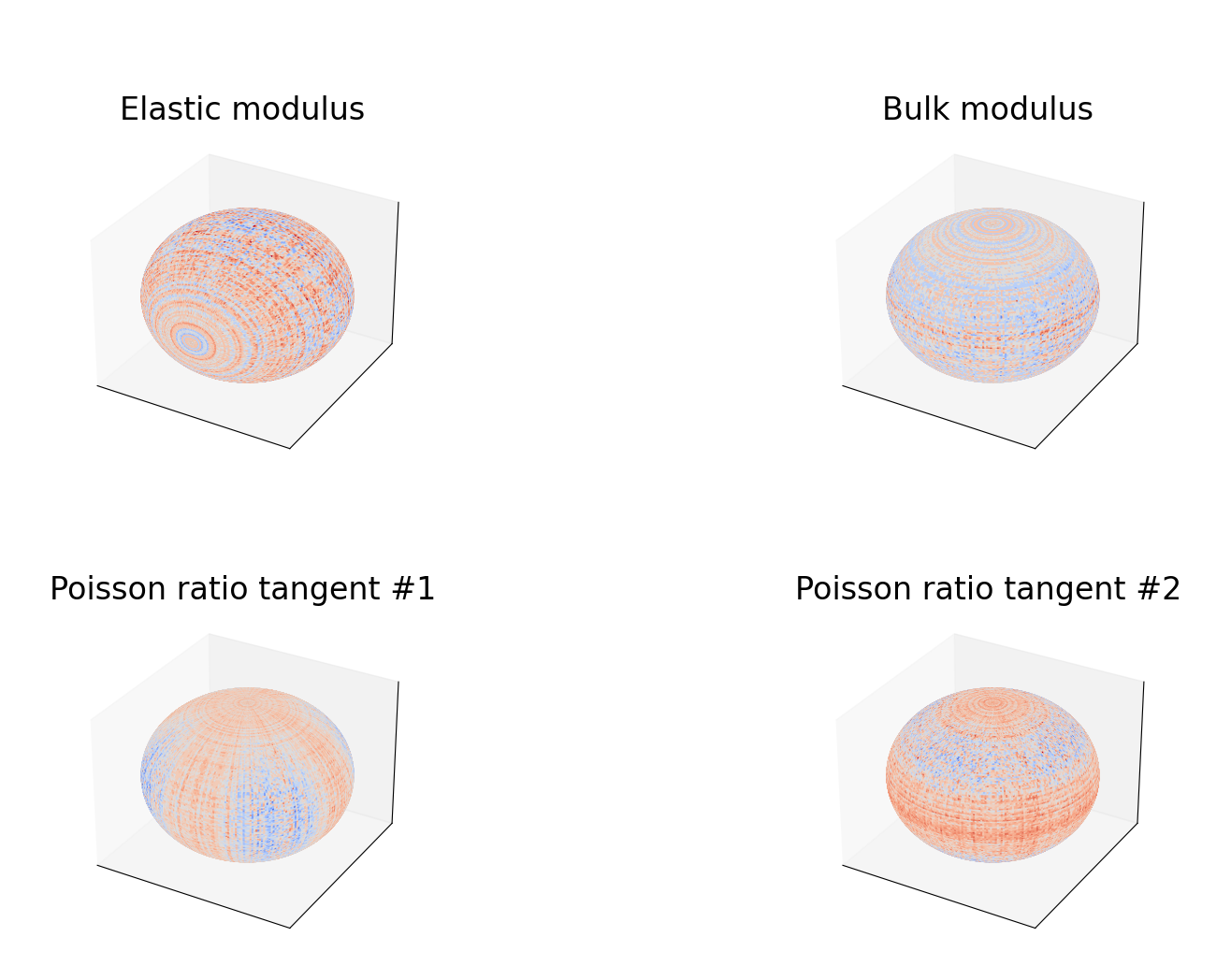
Results
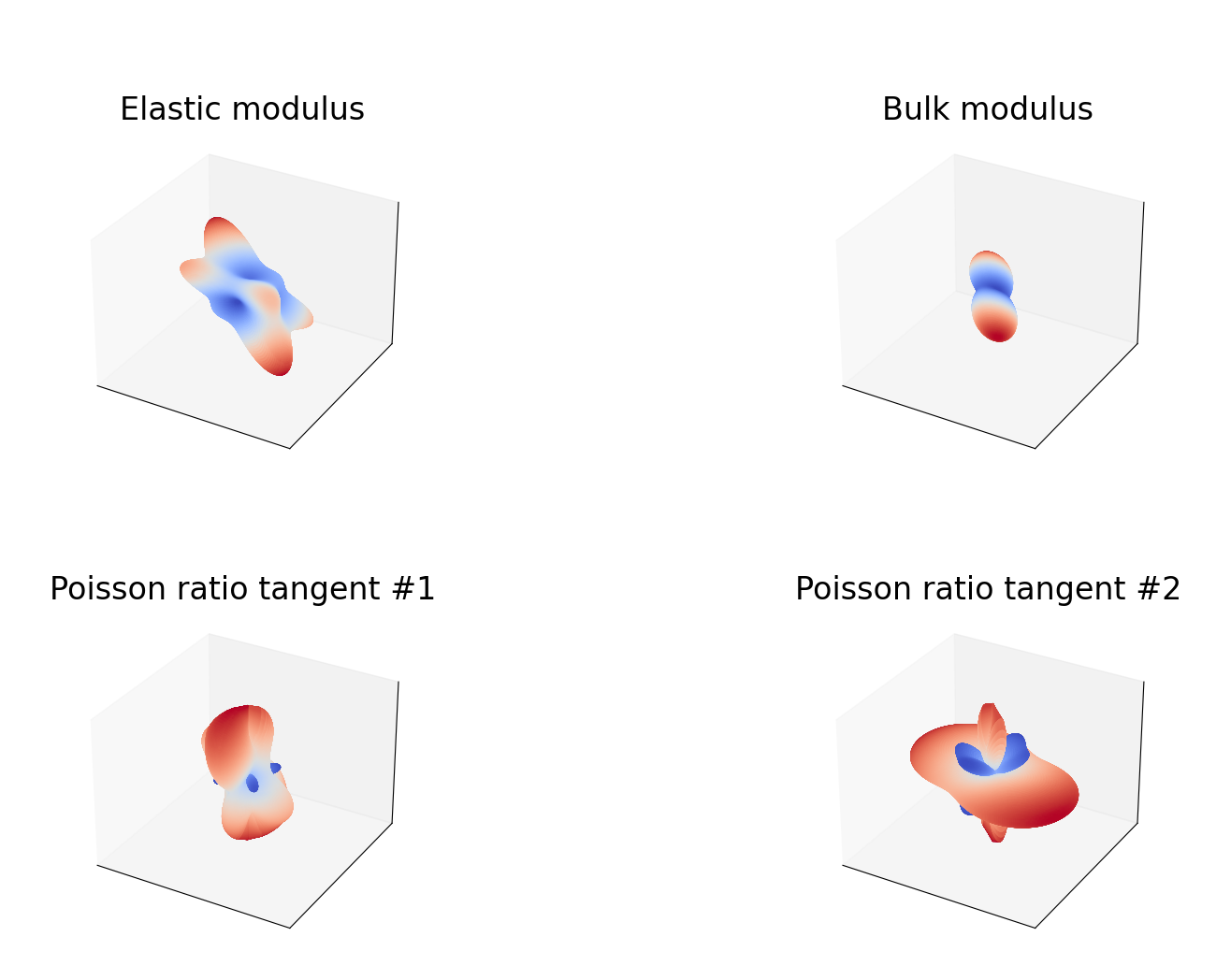
Directions $\mathbf{d}(\phi,\psi)$ are sampled through a mesh in spherical coordinates. Then, the material modulus is evaluated and used as a radius in the spherical coordinate, reslting in s set of coordinates ${r, \phi,\psi}$ for each sampled direction.
Anisotropic
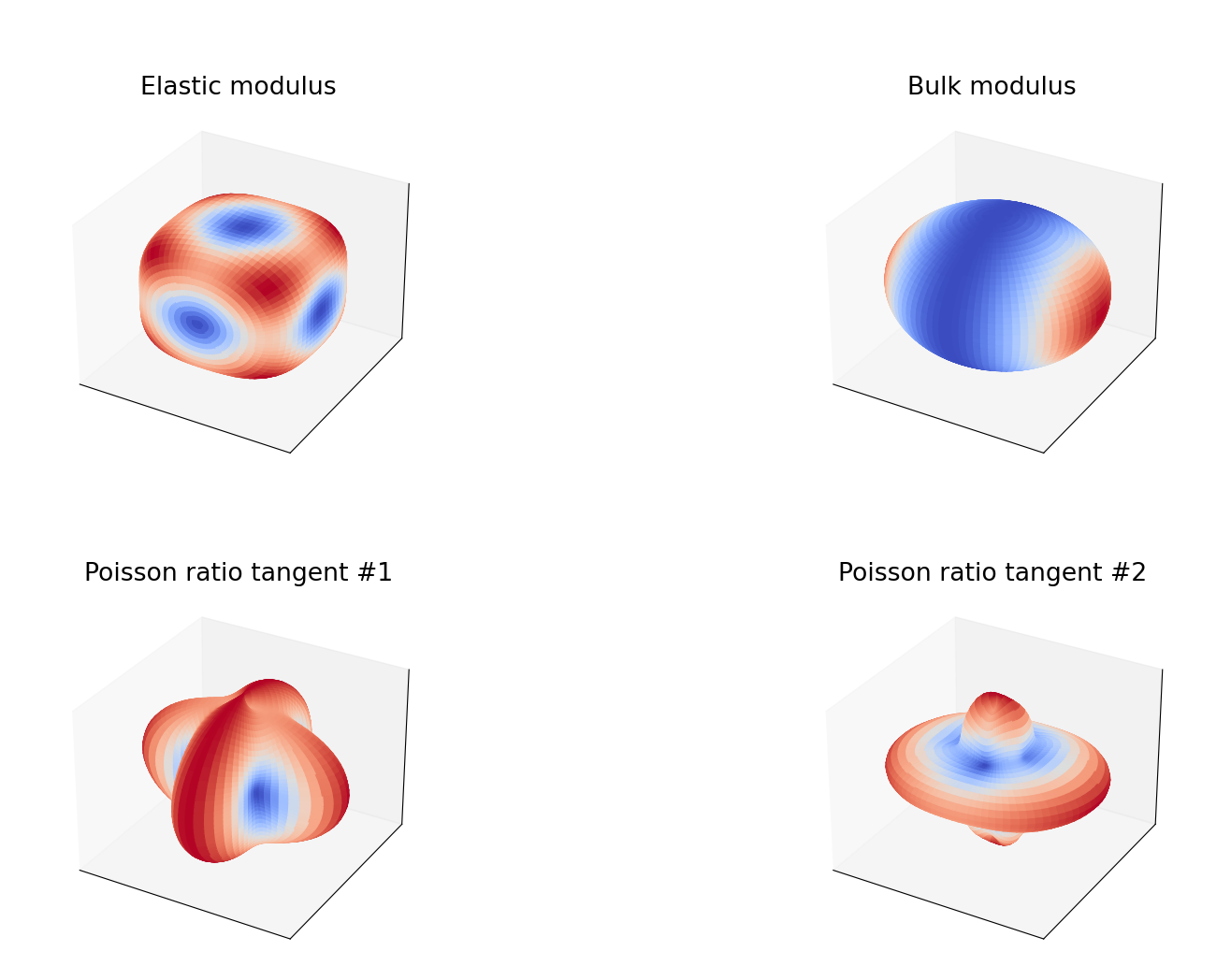
Orthotropic
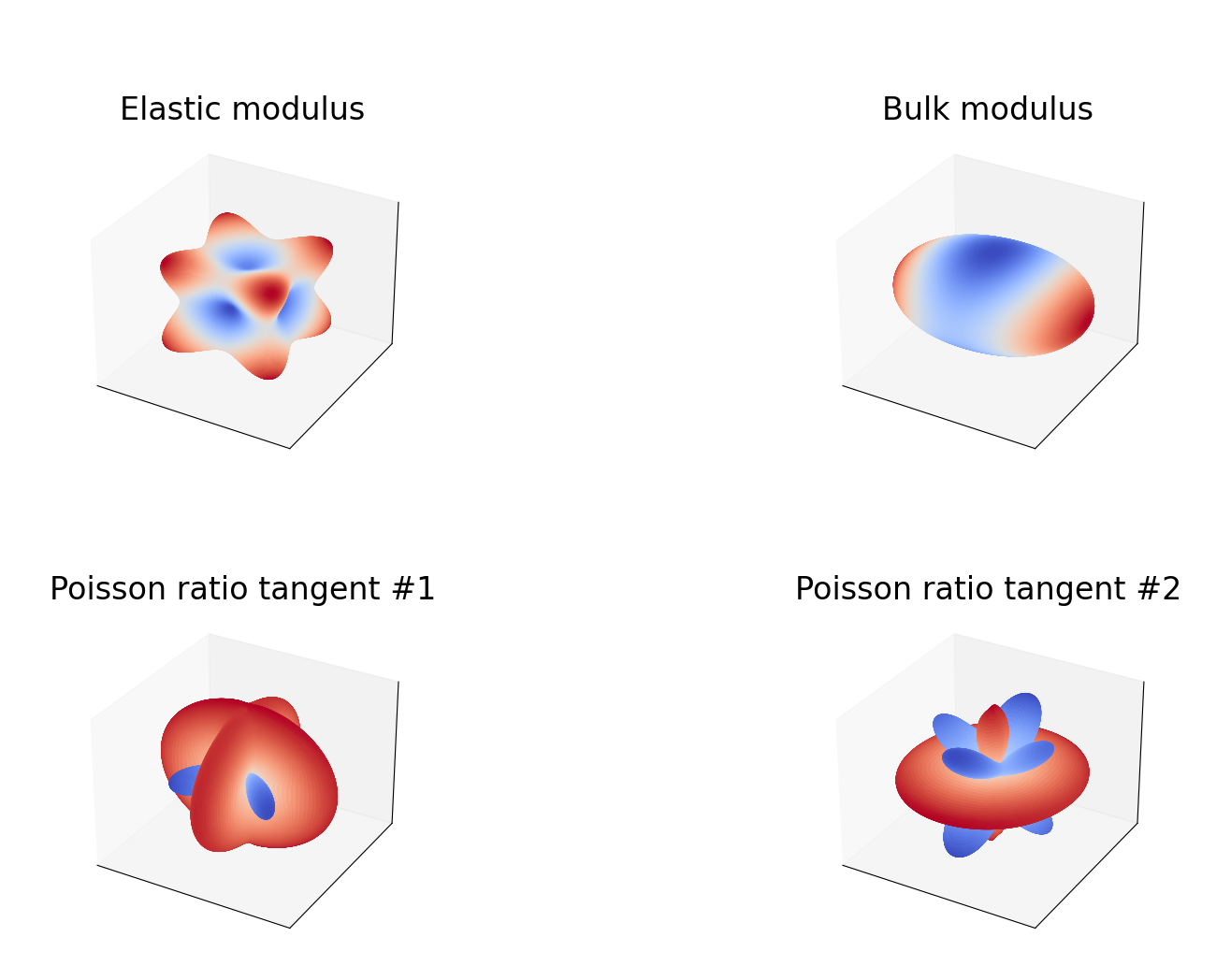
Transverse Isotropic
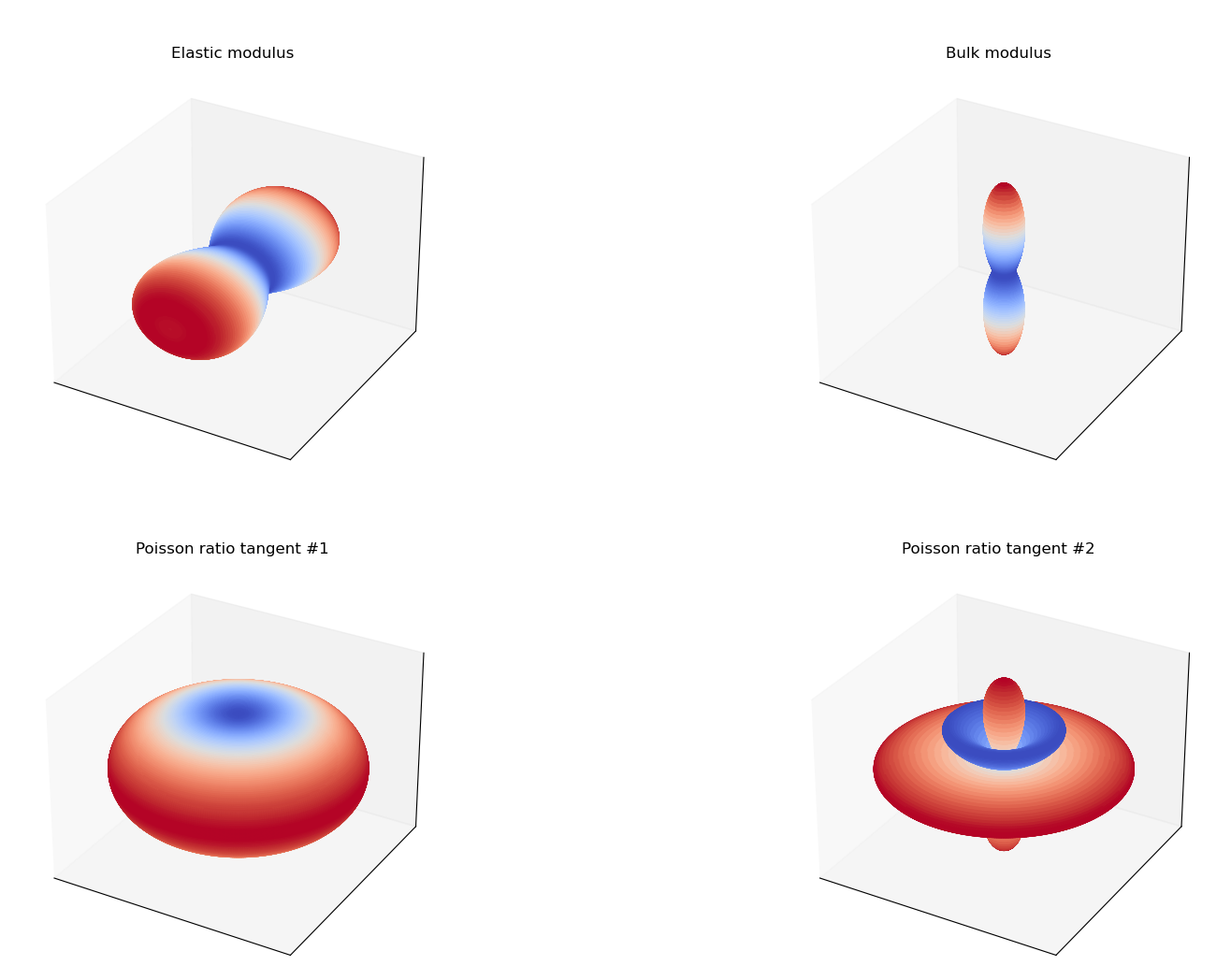
Isotropic
Böhlke, Brüggemann (2001). Graphical representation of the generalized Hooke’s law ↩︎ ↩︎2